(1) MPU6050模块¶
通过此MPU6050模块可以获得被控对象的3 轴加速度计输出、3轴陀螺仪输出和温度输出。
MPU6050 是一种6轴空间运动传感器芯片,集成了3轴MEMS陀螺仪和3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP,可用I2C接口与目标机通讯,其它原理介绍参考博客。通过相关姿态解算与融合可以得到被控对象的姿态信息。关于姿态解算与融合,推荐参考全权编写的《多旋翼飞行器设计与控制》。
为了使用此模块,用户需要对其进行参数配置。而考虑资源使用问题,设计使能数据获取通道:
Is Use Accel XY:使能加速度计X轴和Y轴的数据通道;
Is Use Accel Z:使能加速度计Z轴的数据通道;
Is Use Gryo XY:使能陀螺仪X轴和Y轴的数据通道;
Is Use Gryo Z:使能陀螺仪Z轴的数据通道;
Is Use Temp:使能温度测量通道;
Sample Time:采样时间.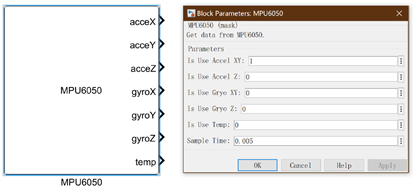
如上图的MPU6050模块,对应加速度计和、陀螺仪和温度传感器的输出。在定制模块时,已对MPU6050的属性进行了设置。
MPU6050(I2C_TypeDef* I2Cx = I2C1, uint8 ownAddress = 0xD0, /*使用I2C1*/ MPU6050_GyroScaleTypeDef gyroScale = MPU6050_GYRO_SCALE_250DPS, /*陀螺仪的满量程范围为±250DPS*/ MPU6050_AcceScaleTypeDef acceScale = MPU6050_ACCE_SCALE_2G); /*加速度传感器的满量程范围为±2G*/进行相关初始化,相关参数信息查看I2C
I2C_InitInfoTypeDef initInfo; /*采用I2C1与目标机通信,并对I2C初始化*/ initInfo.Mode = I2C_MODE_STANDARD_MODE; initInfo.FastModeDutyCycle = I2C_FAST_MODE_DUTY_CYCLE_2_1; initInfo.SCLRiseTime = 1000; initInfo.isEnableClockStretching = true; initInfo.isNeedI2C1PinRemap = true; I2C_Init(I2Cx, &initInfo);