5.3直流电机抗扰PID调速控制实验¶
实验目标:掌握直流电机调速系统原理,能够搭建调速系统;掌握抗扰PID基本原理,并应用于直流电机调速控制实验中。
系统框图¶
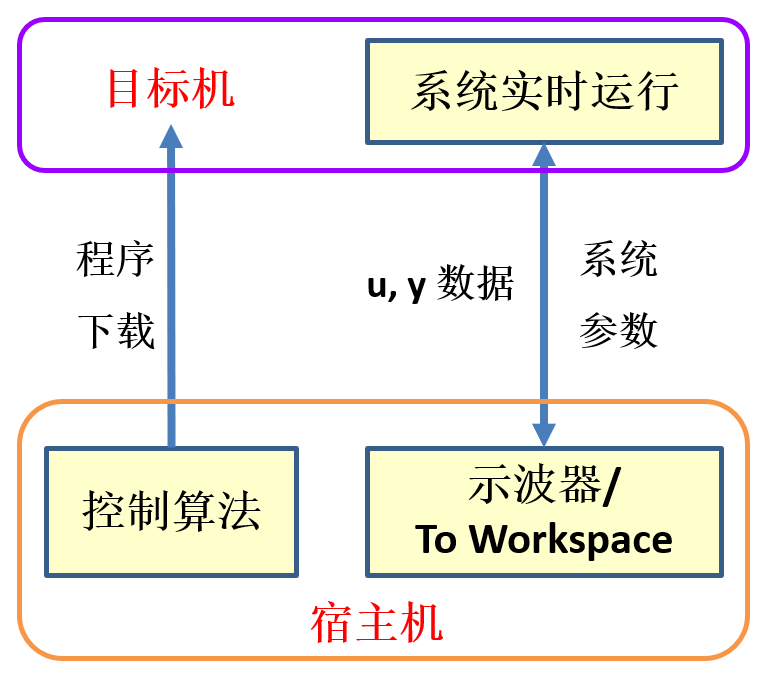
实验系统主要包括宿主机与目标机的程序下载、实时数据通信两个部分,如下图所示。
在上一小节 5.2直流电机系统辨识实验:数据采集与保存 的基础上,进行本节实验。其中,硬件参数、系统相关信号设定、硬件连接以及驱动板、编码器测试与上节相同,此处不再赘述。
步骤1:算法设计¶
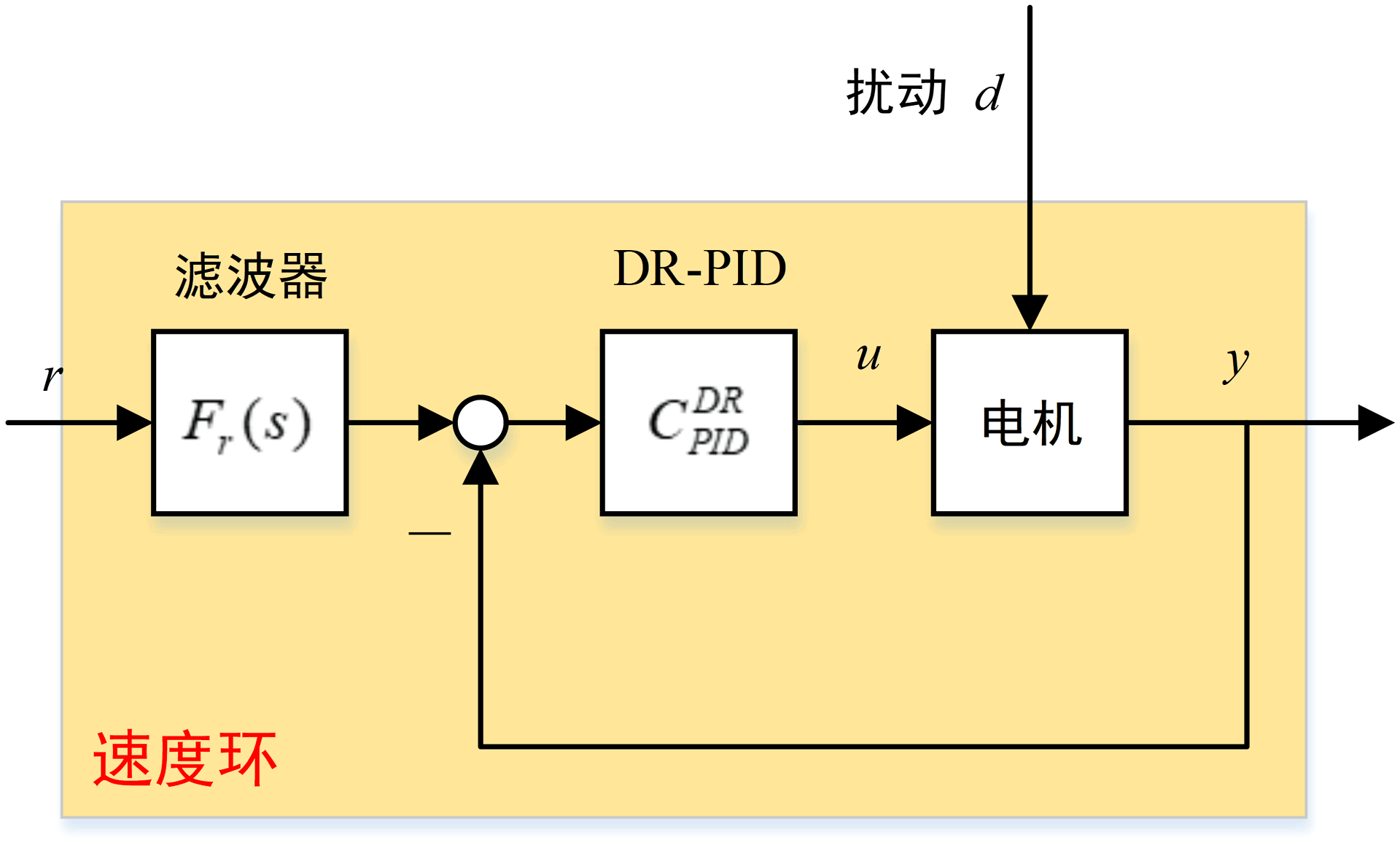
直流电机速度控制系统结构如下,其中,速度控制采用抗扰PID(DR-PID)控制器,可选前置滤波器以克服超调。
PID控制器的抗扰原理以及 章节 3.3.2 抗扰PID控制器 。
DR-PID公式如下:
\[C_{PID}^{DR}(s) = {K_P}\left( {1 + \frac{{{\omega _c}}}{{\alpha + 1}}\frac{{\rm{1}}}{s}{\rm{ + }}\frac{\alpha }{{(\alpha + 1){\omega _c}}}s} \right)\]式中, \({\omega _c}\) 为期望带宽,决定闭环响应速度,期望闭环为 \({\omega _c}/(s + {\omega _c})\) ; \({K_P}\) 为控制器增益,相同条件下,逐步增大 \({K_P}\) 可改善系统性能; \(\alpha \)alpha = 0` 为PI控制器, \(\alpha = 1\) 为ZN-PID。
调参思路:
1)先设定 \({\omega _c}\) (目标),然后调节 \({K_P}\) 和 \(\alpha\) (手段);
2)如果系统存在超调,可在输入端加入滤波器(任意形式)。
上述公式适用于:机电系统、一阶时滞系统、积分型(液位)系统、最小/非最小相位系统等各类常见工业对象。
相对于常规PID调参方法,抗扰PID有以下特点:
1)主动抗扰:具有主动抗扰能力;
2)机理明确:三个参数 \({\omega _c}\) , \({K_P}\) 和 \(\alpha\) 具有明确物理含义,且参数与控制性能建立了直接关联,调参机理明确、调参思路清晰;
3)通用性强:适用于不同类型对象,调参方法具有一致性;
4)等价性:可与各类经典PID调参方法建立等价性。例如, \(\alpha = 1\) 即为ZN-PID。
步骤2:仿真¶
通过上节系统辨识实验,获得的电机模型为:
\[G(s) = \frac{{75910}}{{{s^2} + 858.4s + 9780}}\]式中系统极点:s1=-11.5(主导), s2=-846.8。
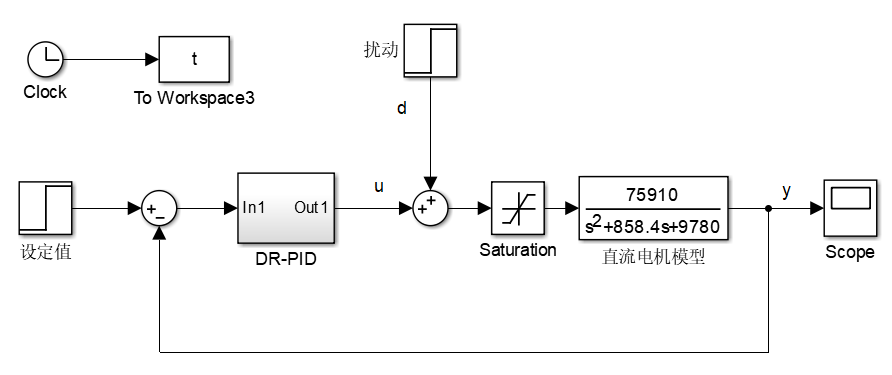
在Simulink中搭建仿真程序如下图所示:
方案1:PID控制
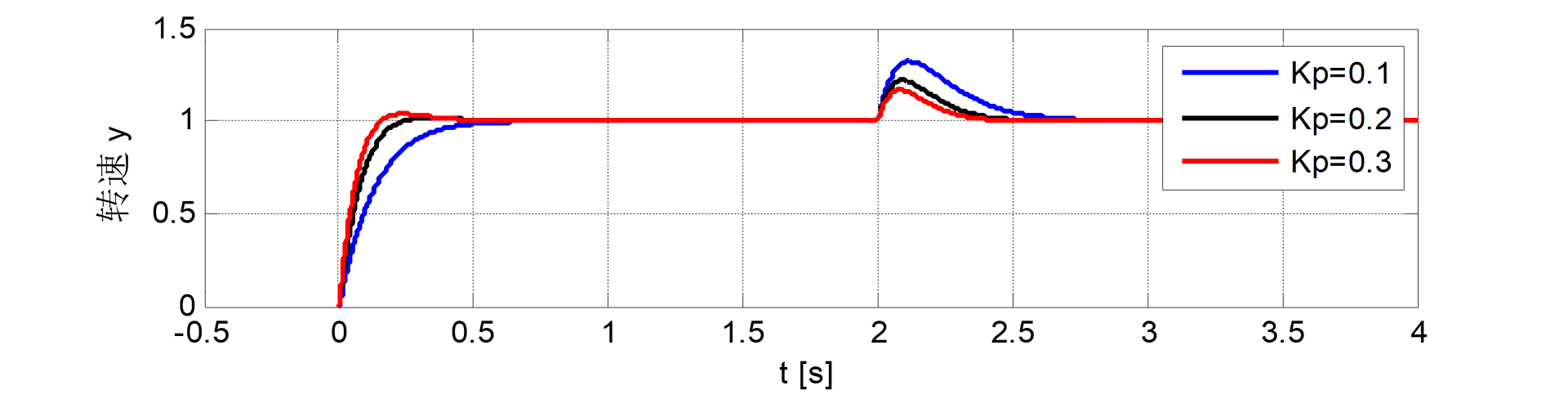
直流电机为快系统,闭环响应可以很快,因此 \({\omega _c}\) 可取大,取 \({\omega _c} = 20\) ;取 \(\alpha = 1\) ,仿真中 \({K_P}\) 逐渐增大0.1、0.2、0.3。仿真结果如下图所示:
方案2:PI控制
取 \({\omega _c} = 20\) ;取 \(\alpha = 0\) 为PI,仿真中 \({K_P}\) 逐渐增大0.1、0.2、0.3。仿真结果如下图所示:
综合以上两种方案,可以得到下表所示结论:
速度环 |
方案1 PID |
方案2 PI |
|---|---|---|
跟踪 |
超调小, |
超调小, |
相对慢 |
快 |
|
抗扰 |
慢 |
快 |
wo(抗扰原理) |
大 |
小 |
控制量 |
微分影响 |
无微分影响 |
存在问题 |
噪声敏感,带宽受限 |
|
结论 |
代价大 |
代价小 |
步骤3:实验测试¶
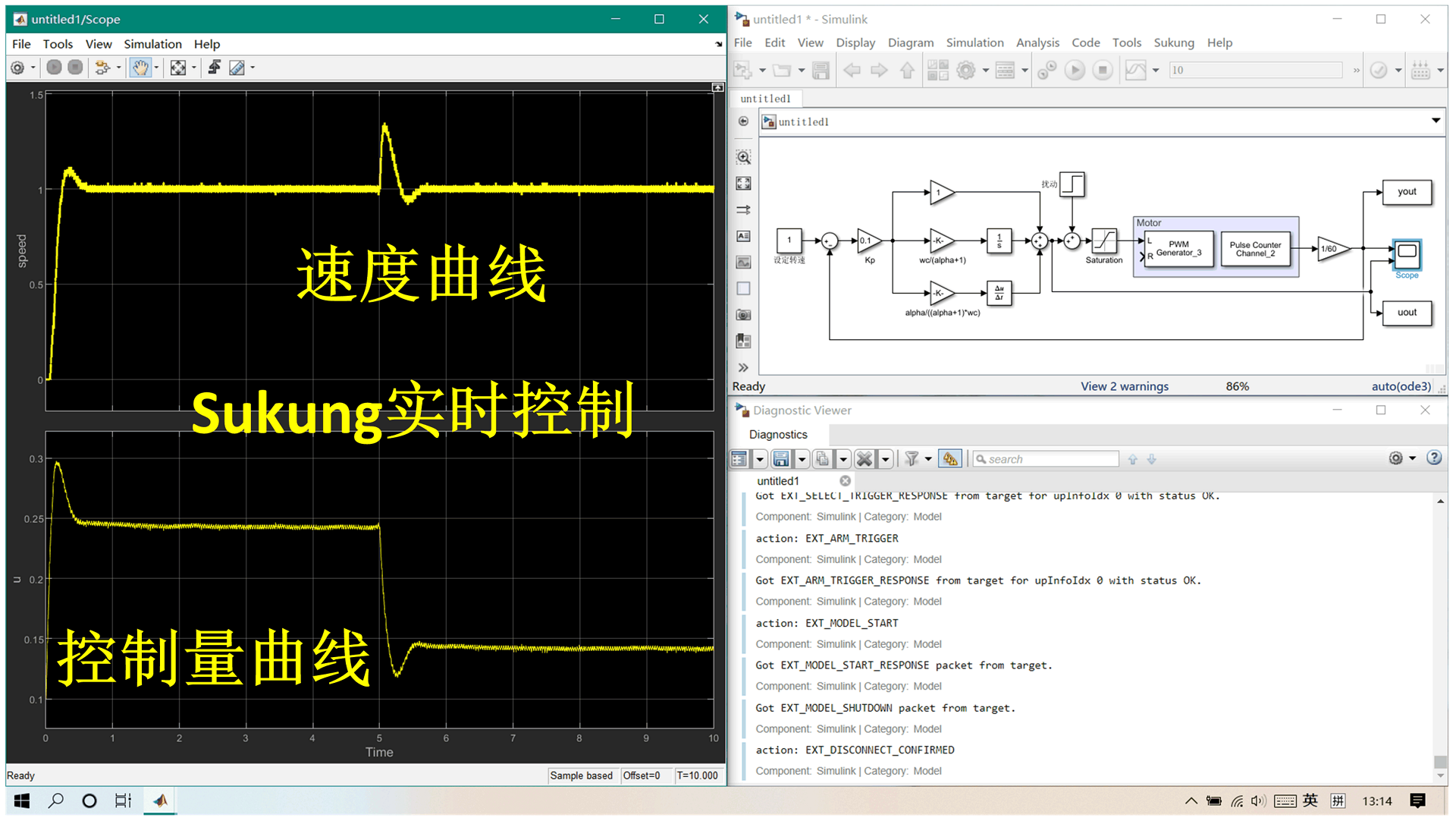
在Simulink搭建实验模型及各模块参数设置如下图所示,其中在第5秒时刻添加0.1的恒值扰动,控制系统运行时间为10s,控制步长为0.001s(区别于上一节的0.002s,这里没有很大的运算量,因而控制周期可设为最小允许值0.001s)。
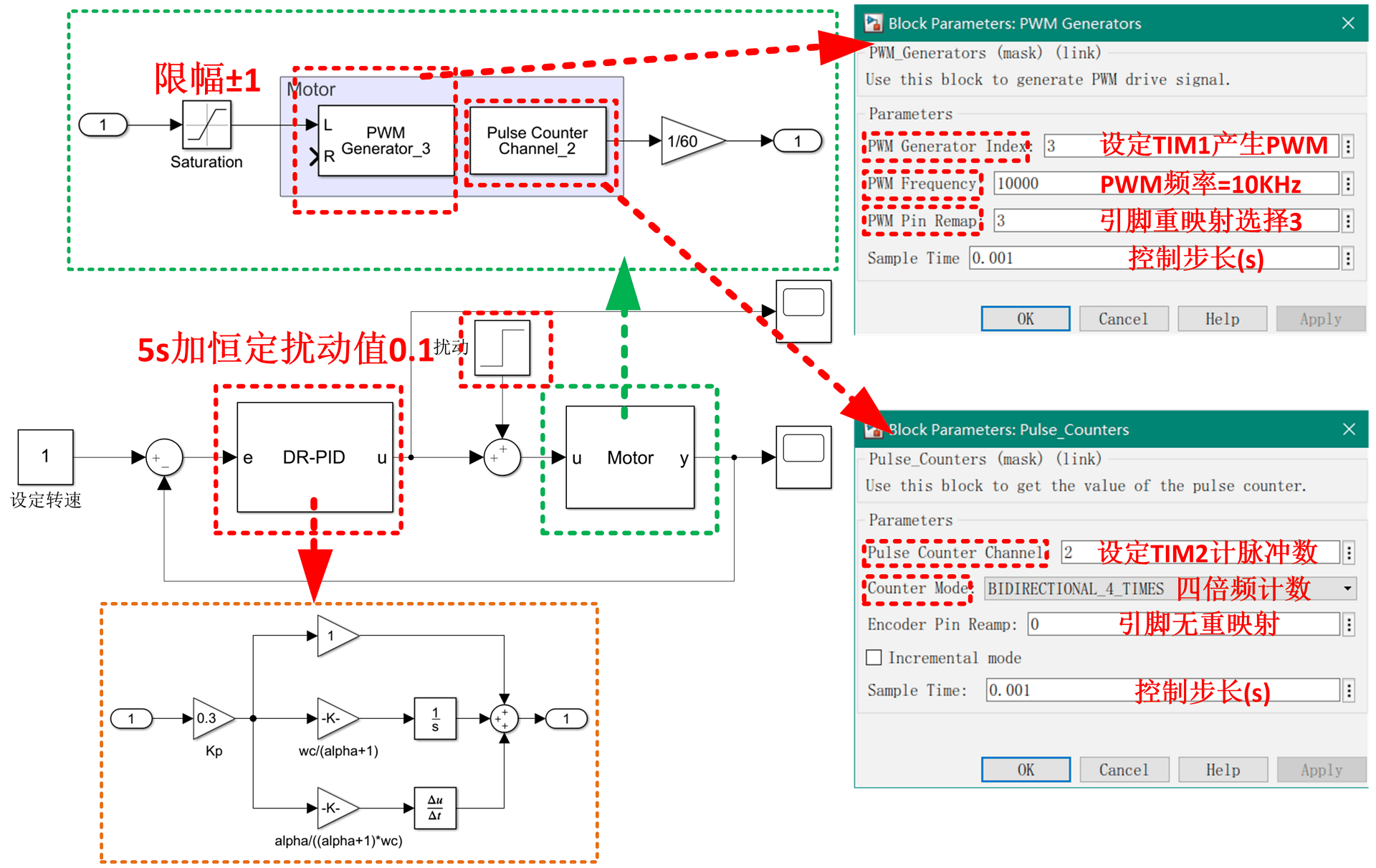
点击编译,一键部署生成的代码,复位STM32开发板,点击连接、运行,打开示波器查看实时控制曲线,如下图所示(这里展示的是未封装的slx模型)。每次运行完保存数据,以备后续分析。
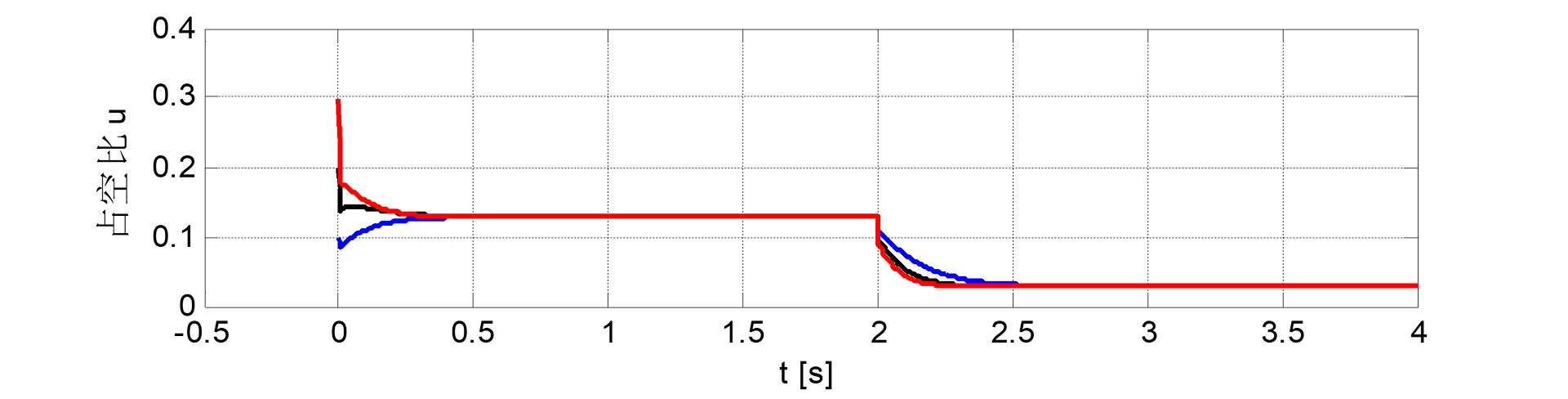
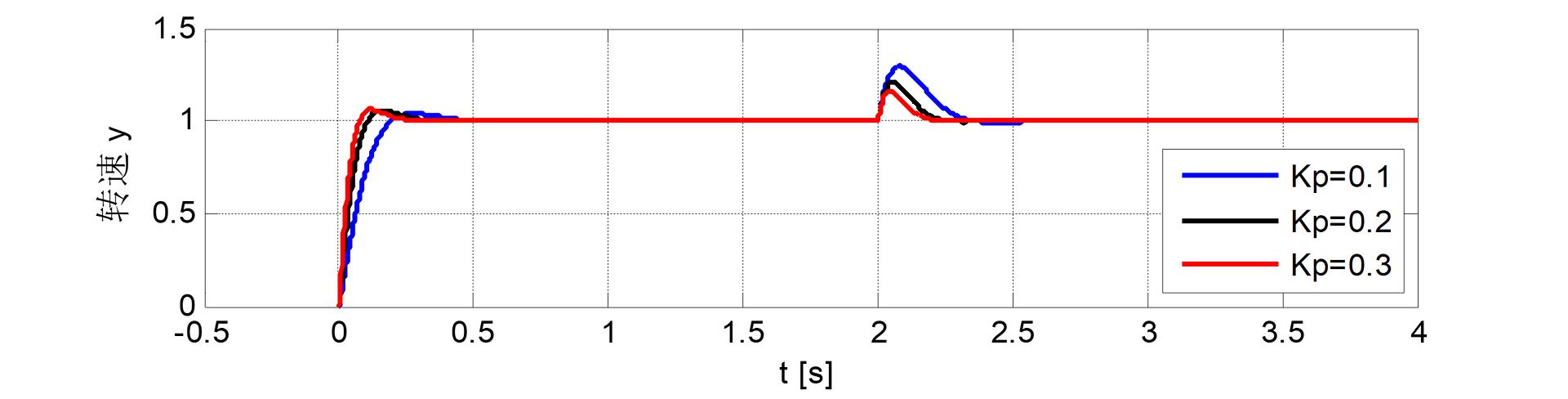
方案1:PID控制
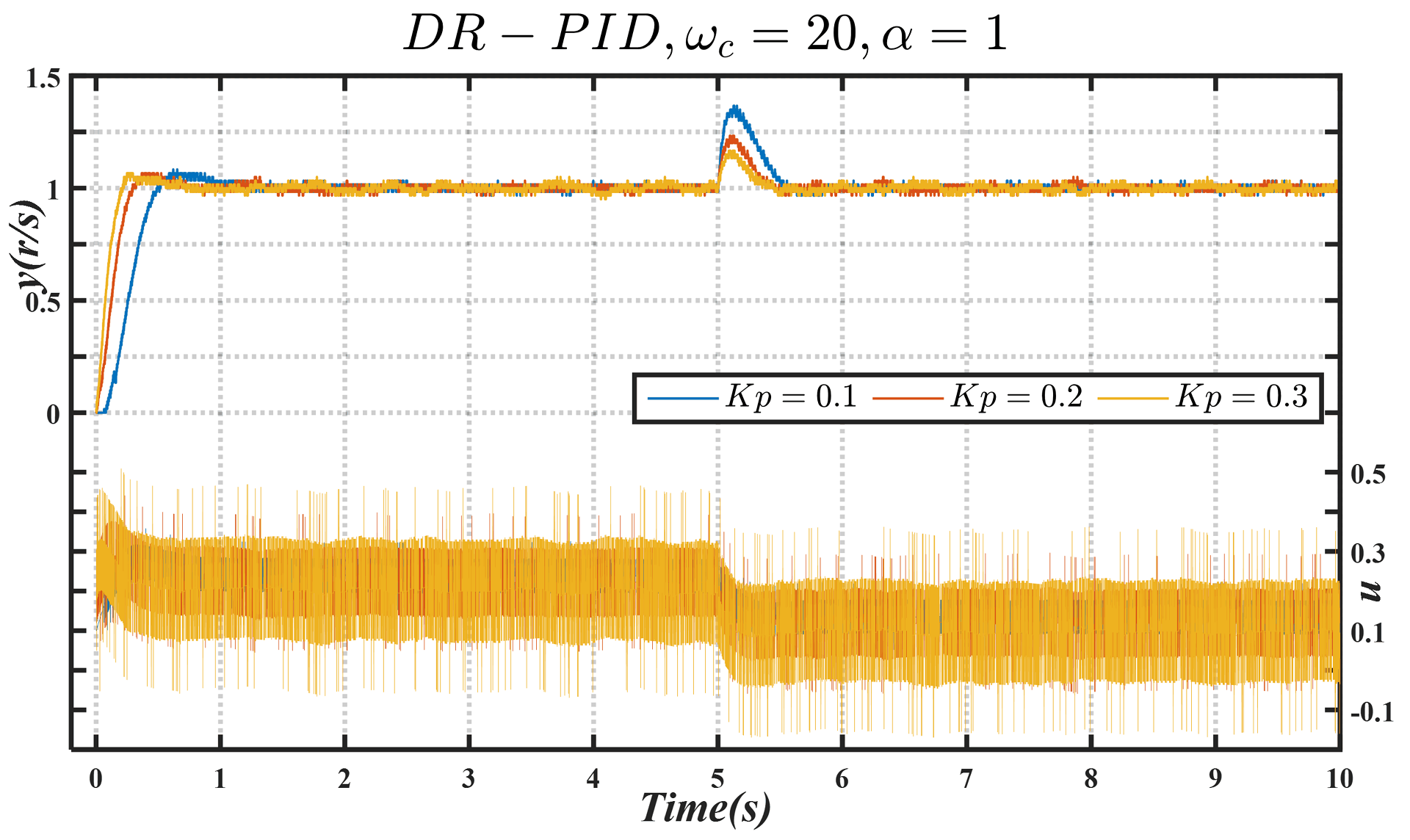
取 \({\omega _c} = 20\) , \(\alpha = 1\) ,实验中 \({K_P}\) 逐渐增大,取0.1、 0.2、0.3。绘图如下:
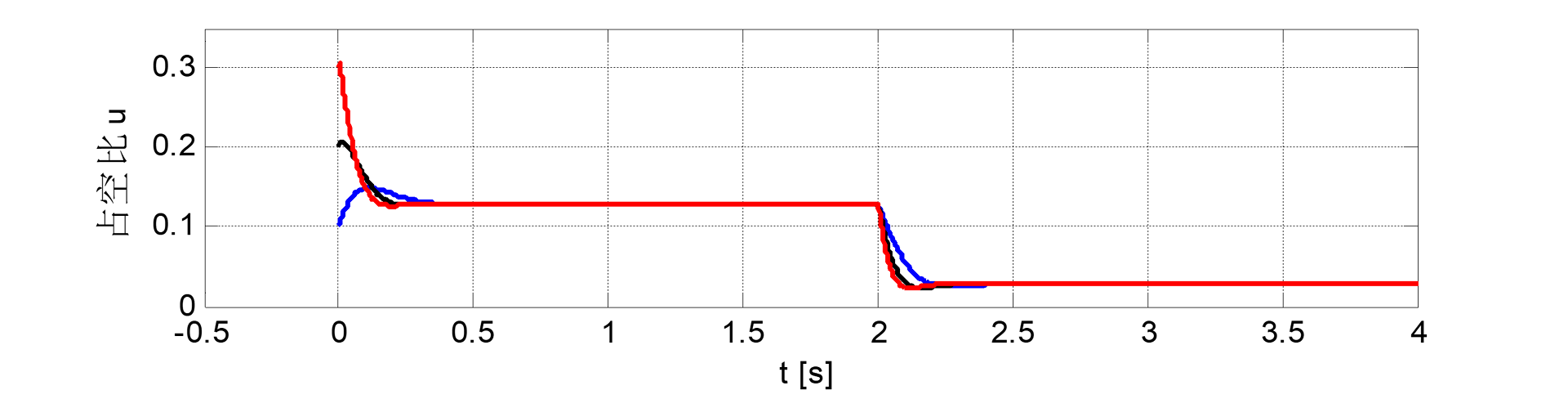
方案2:PI控制
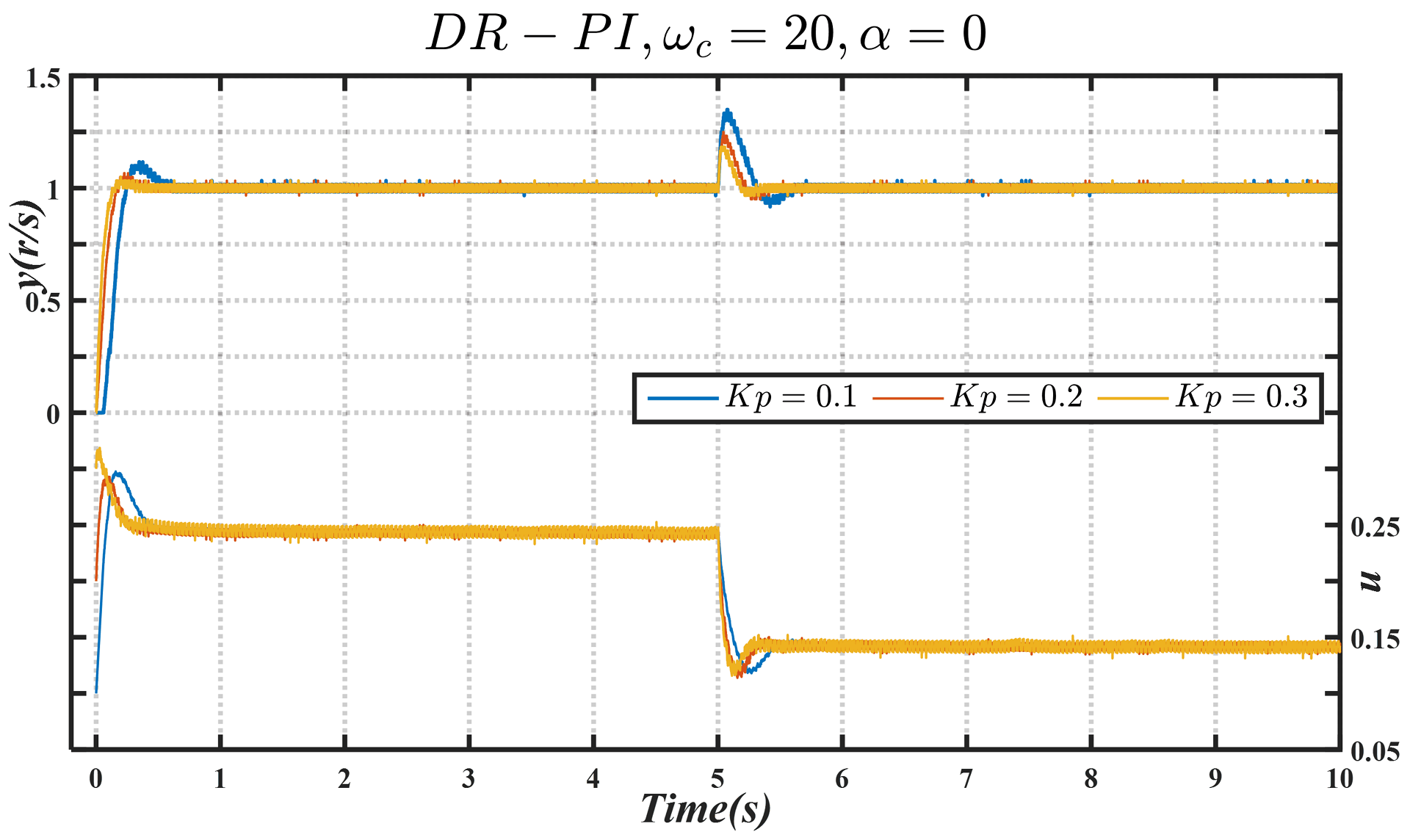
取 \({\omega _c} = 20\) , \(\alpha = 0\) ,,此时控制器为PI,实验中 \({K_P}\) 逐渐增大0.1, 0.2,0.3。绘图如下:
方案3:带前置滤波器PID/PI控制
添加一阶前置滤波器如下图所示:
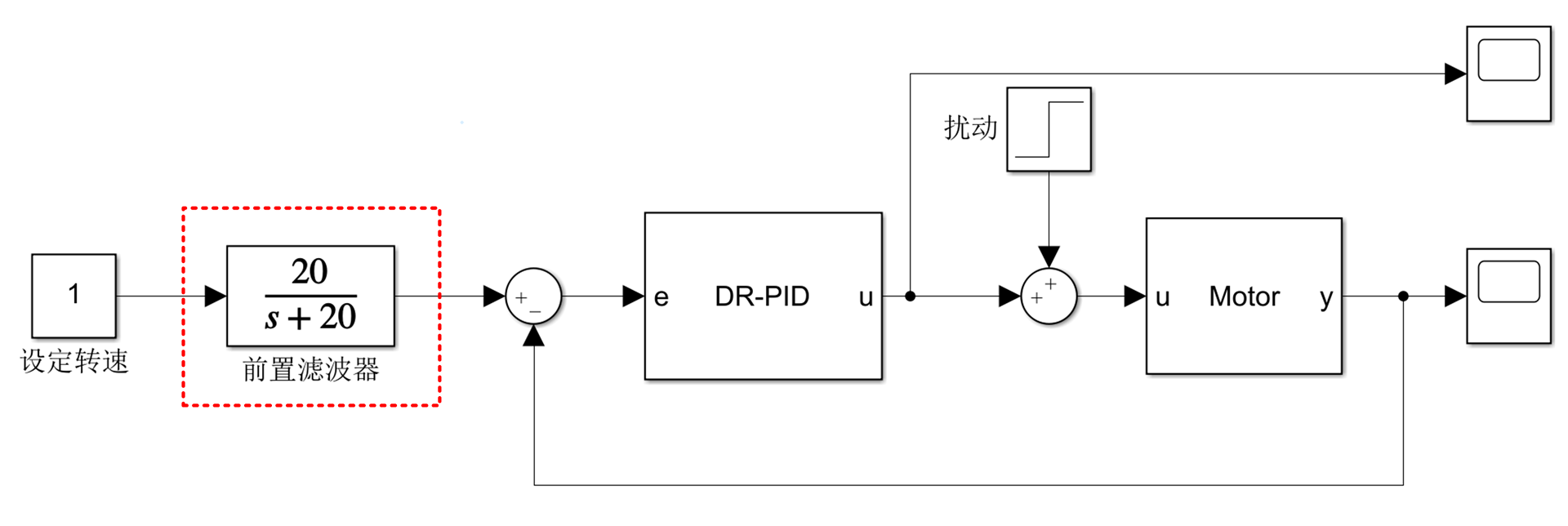
取 \({\omega _c} = 20\) , \({K_P} = 0.3\) , \(\alpha = 0.1\) 。绘图如下:
小结¶
本实验搭建了直流电机调速系统,并通过Sukung实现了Simulink下的仿真与实验的相互验证,并使用抗扰PID控制器,达到了良好的控制效果。此外,用户还可以尝试在线修改期望速度以及控制器参数。