3.3.2 抗扰PID控制器¶
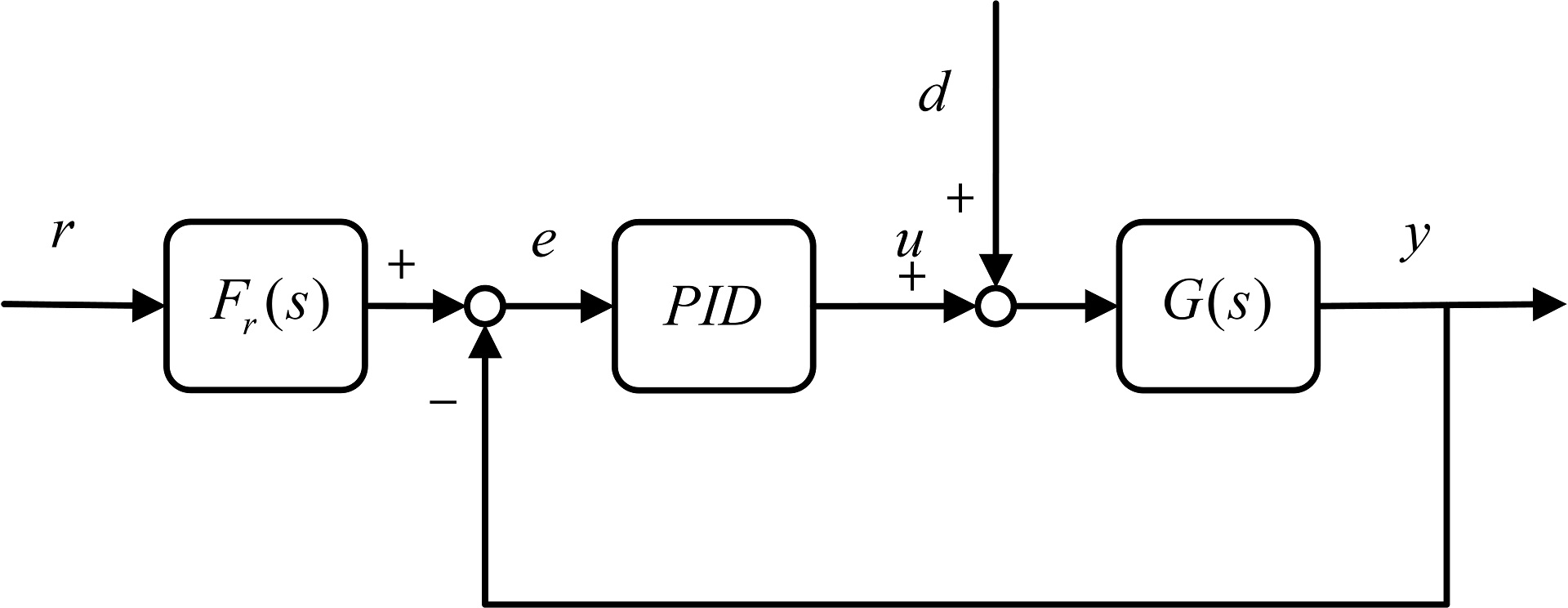
抗扰PID控制(Disturbance Rejection Proportional-Integral-Derivative control, DR-PID),是一种基于自抗扰控制原理设计的先进PID控制方法,见文献[3,4]。抗扰PID控制器采用了经典PID形式和自抗扰控制设计方法,参数调节简单、适用范围广、鲁棒性强,其调节方法与PID工程调参经验兼容。反馈控制结构如下图所示。
得益于ADRC中的带宽化调节方法,DR-PID参数调节非常简单,且物理含义明确。其基本公式为
\[C_{PID}^{DR}(s) = {K_P}\left( {1 + \frac{{{\omega _c}}}{{\alpha + 1}}\frac{{\rm{1}}}{s}{\rm{ + }}\frac{\alpha }{{(\alpha + 1){\omega _c}}}s} \right)\]其中
\(\omega _c\) 为期望闭环带宽,决定闭环响应速度。由被控对象快买特性决定。期望闭环模型为 \(\frac{{{\omega _c}}}{{s + {\omega _c}}}\) 。
\(K_P\) 为控制器增益,相同条件下,逐步增大 \(K_P\) 可改善系统的抗扰性能和跟踪性能。
\(\alpha\) 代表相位超前补偿。\(\alpha = 0\) 即为PI控制器,\(\alpha = 1\) 即等效经典的ZN-PID。一般来看,\(\alpha\) 可在1附近进行微调。
几点说明:
调参顺序为,先设定 \(\omega _c\) 即闭环目标,然后调节 \(K_P\) 和 \(\alpha\) ,即实现目标的手段。
如果系统存在超调,可在输入端加入滤波器 \({F_r}(s)\) 。
DR-PID适用于机电系统、一阶时滞系统、积分型(液位)系统、最小/非最小相位系统等各类常见工业对象。PID控制器的抗扰原理及相关技术资料详见博客。
在DR-PID下,各个参数物理含义与控制性能建立起了直接关联,有望在DR-PID下建立“白箱”自适应调节与在线优化,同时实现与上层MPC的高效对接,为工业系统APC提供一种实现途径。