3.1使用模式¶
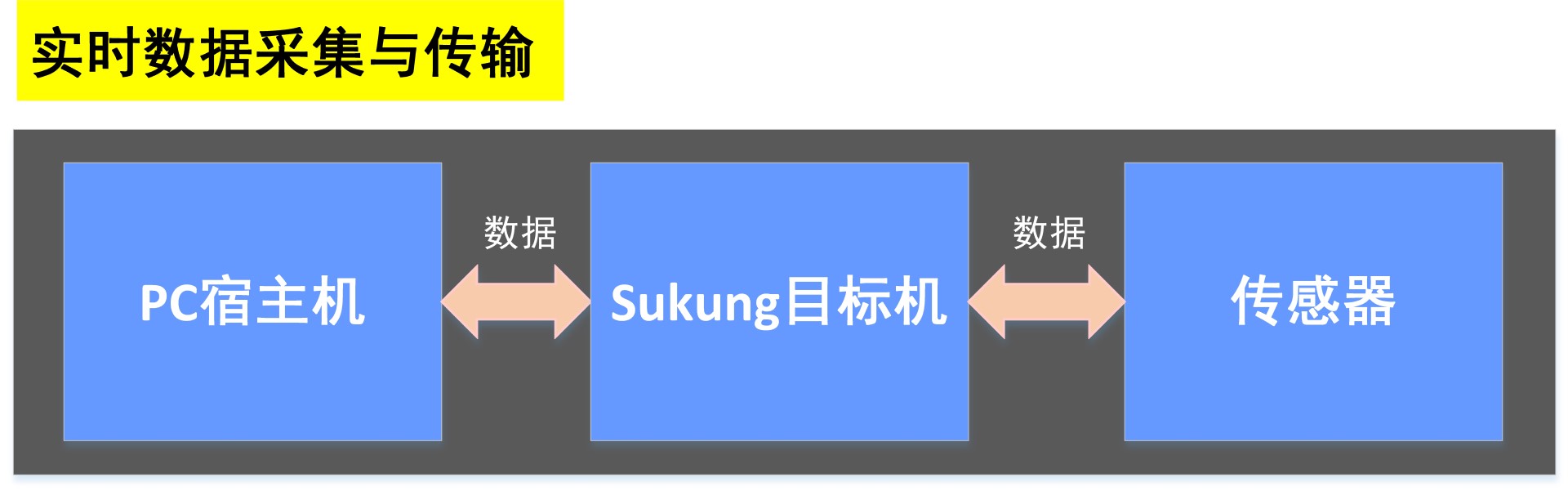
3.1.1 实时数据采集与传输¶
如图基于Sukung平台能很简便地构建面向MATLAB/Simulink的数据采集系统。根据传感器类型和通讯方式,在Simulink中设置相应的Sukung IO模块,并下载至目标机。系统运行时,获取的传感器数据能够在示波器中显示,也可以保存至Workspace,用于后续数据处理与分析。
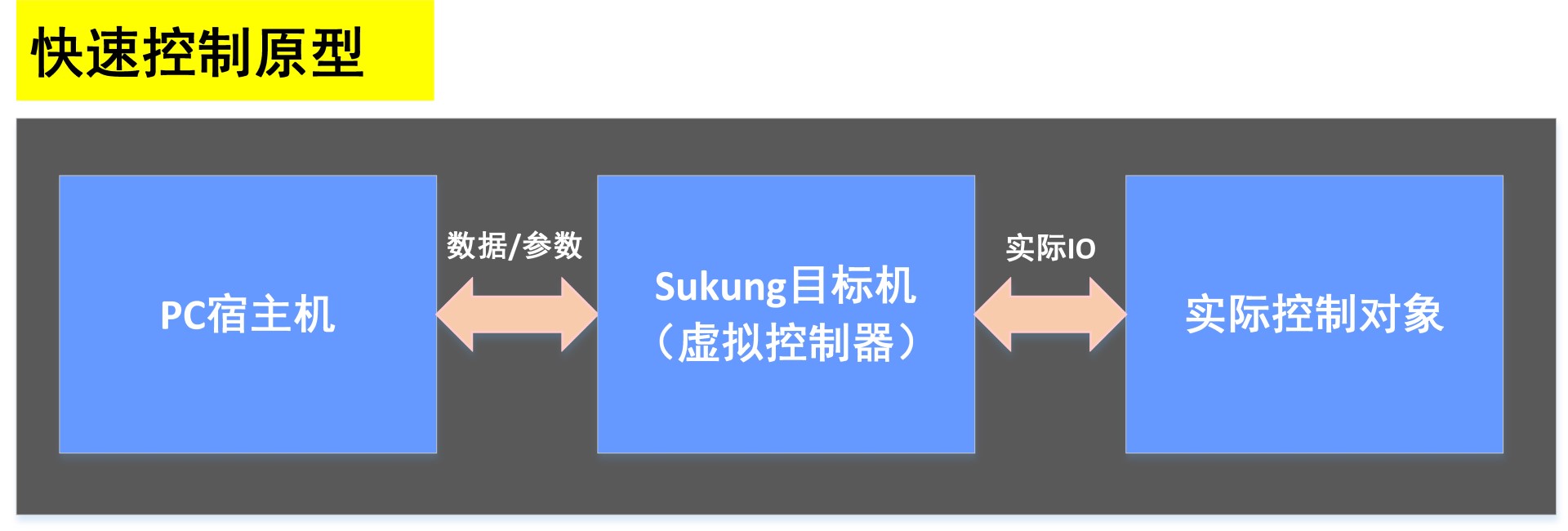
3.1.2 快速控制原型(Rapid Control Prototyping,RCP)¶
如下图所示,快速控制原型就是利用某种手段将开发的算法下载到某个硬件平台中,该硬件平台在实时条件下运行,模拟实际控制器,通过I/O设备与被控对象实物连接,验证算法的可靠性和准确度。简单来看,即
快速控制原型=虚拟控制器+实际控制对象
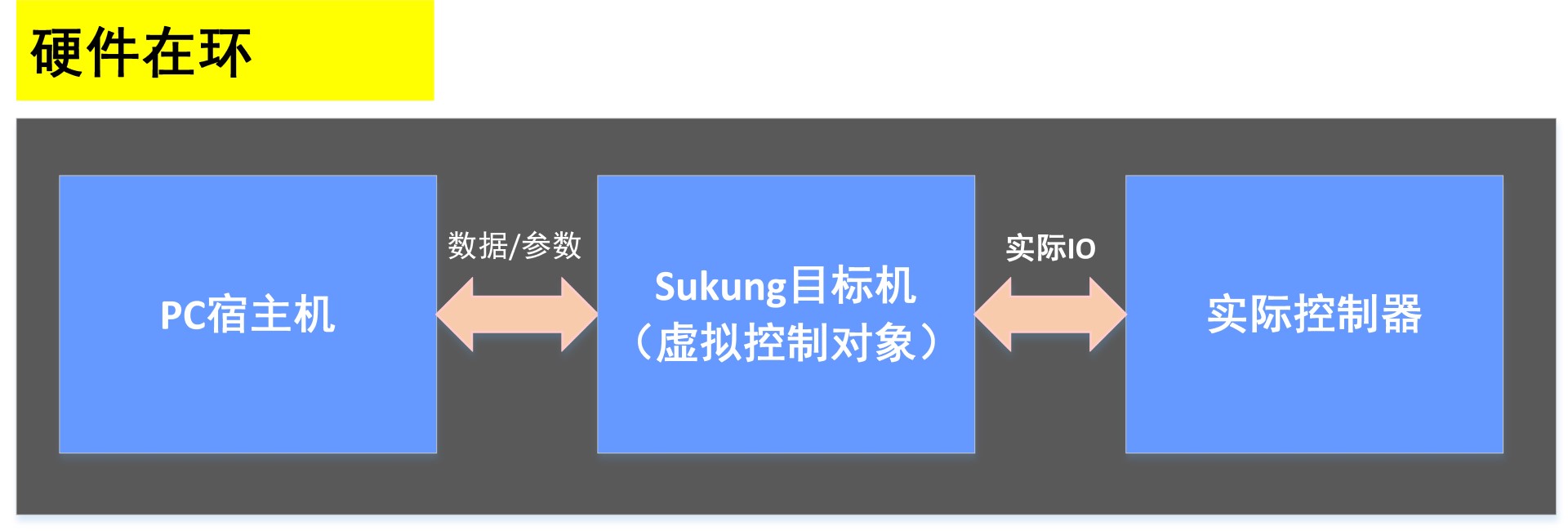
3.1.3 硬件在环(Hardware in the loop,HIL)¶
如下图所示,利用某种硬件平台在实验室中模拟对象在实际工作条件下的运动过程,并且通过相应的I/O设备将信号提供给控制器。此时可通过修改控制对象参数来模拟各种工况,达到全面考察验证控制器开发质量及控制算法可靠程度的目的。简单来看,即
硬件在环=实际控制器+虚拟控制对象
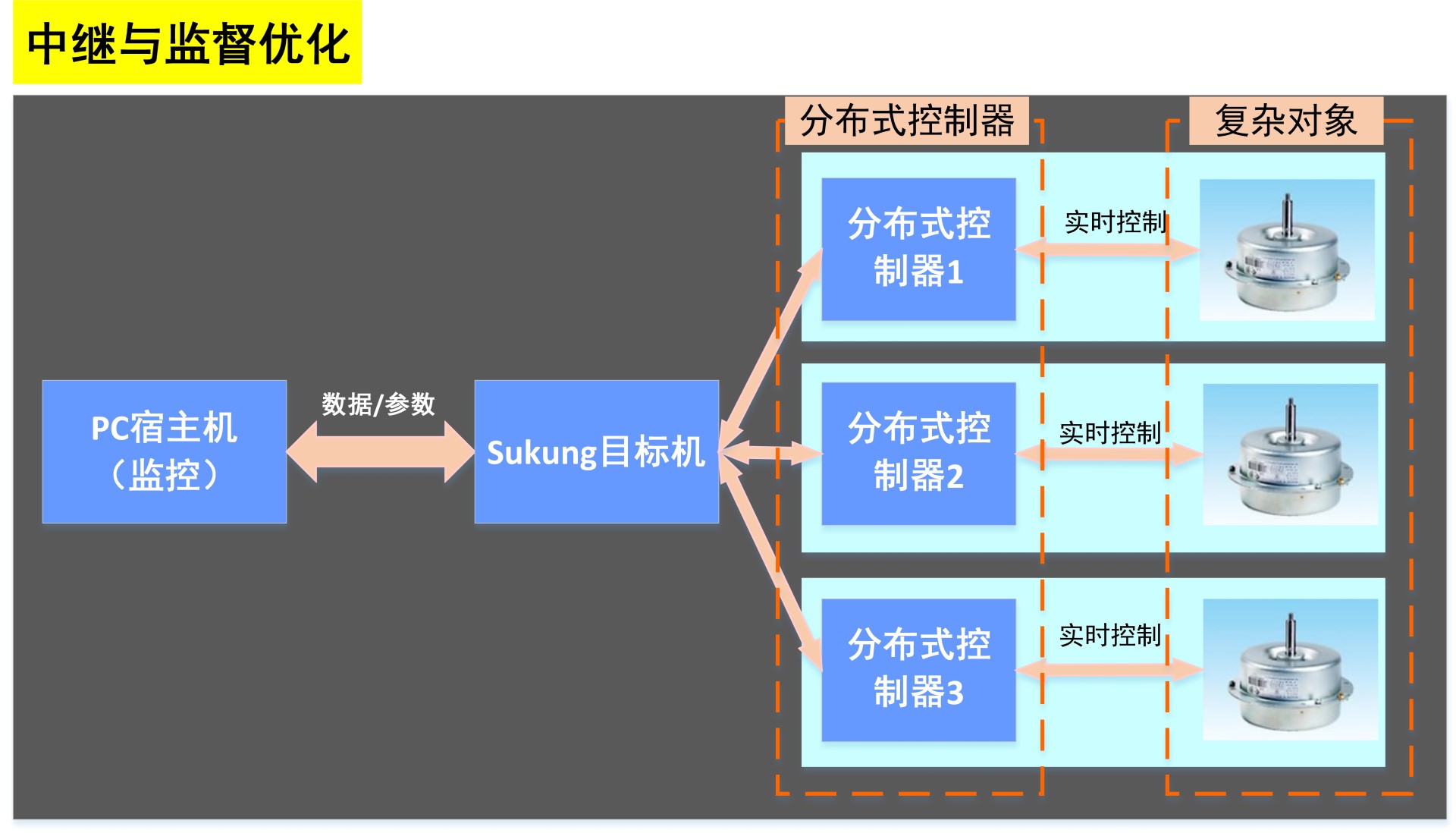
3.1.4 中继与监督优化模式¶
如图下所示,对于复杂系统可采用分布式控制。Sukung目标机可作为MATLAB/Simulink与各个分布式控制器之间实时数据传输中继。同时,还可以对各个分布式控制回路进行在线监督优化。